
Perception.Intelligence.Action.
A research architecture for building intelligent systems from measurement to modeling to deployment.
Neuroide is structured as three connected layers: Perception for sensing and observation, Intelligence for representation and inference, and Action for robotics, control, validation, and execution under real-world constraints.
Featured Articles
A curated shelf of long-form articles spanning biosignals, representation learning, generative modeling, robotics, and simulation.


Perception, Intelligence, and Action
Three pillars organize the site from sensing and representation to embodied execution, making it easier to move across the full stack without losing the systems view.
The work is arranged to keep the pipeline visible: observe the world, build useful internal structure, and test whether those models survive contact with timing, uncertainty, and deployment constraints.
Signals, multimodal sensing, physiological systems, and the conversion of noisy measurement into structured observations.
Machine learning, generative and reasoning systems, representation, inference, and uncertainty-aware model building.
Robotics, control and planning, validation and simulation, and systems that execute under real operational pressure.
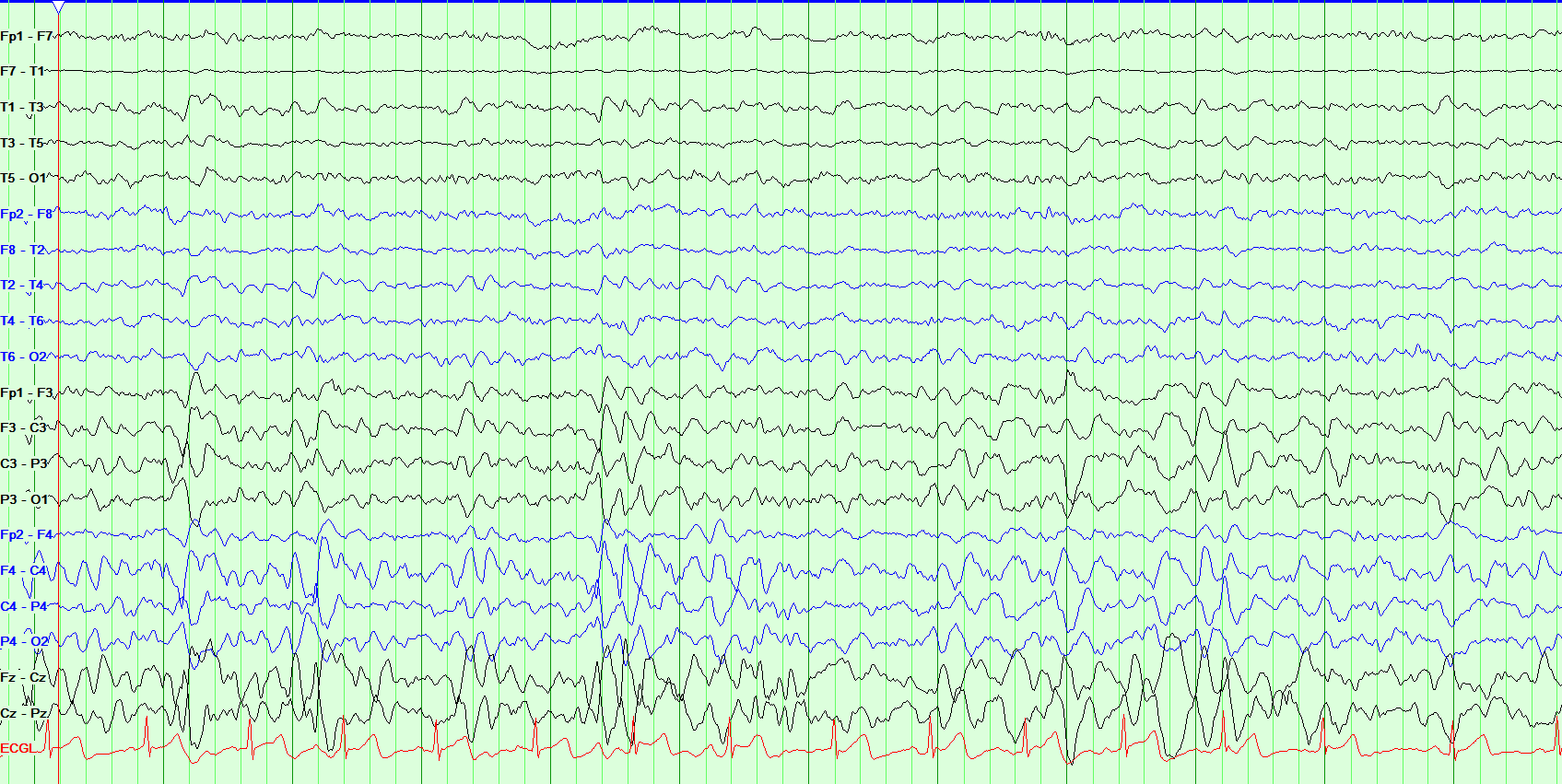
Signals
Signal theory, biosignals, waveform analysis, and the technical realities of noisy sensing and physiological measurement.
Multimodal Sensing
Cross-sensor observation, fused representations, missing-modality robustness, and measurement systems that work across channels.
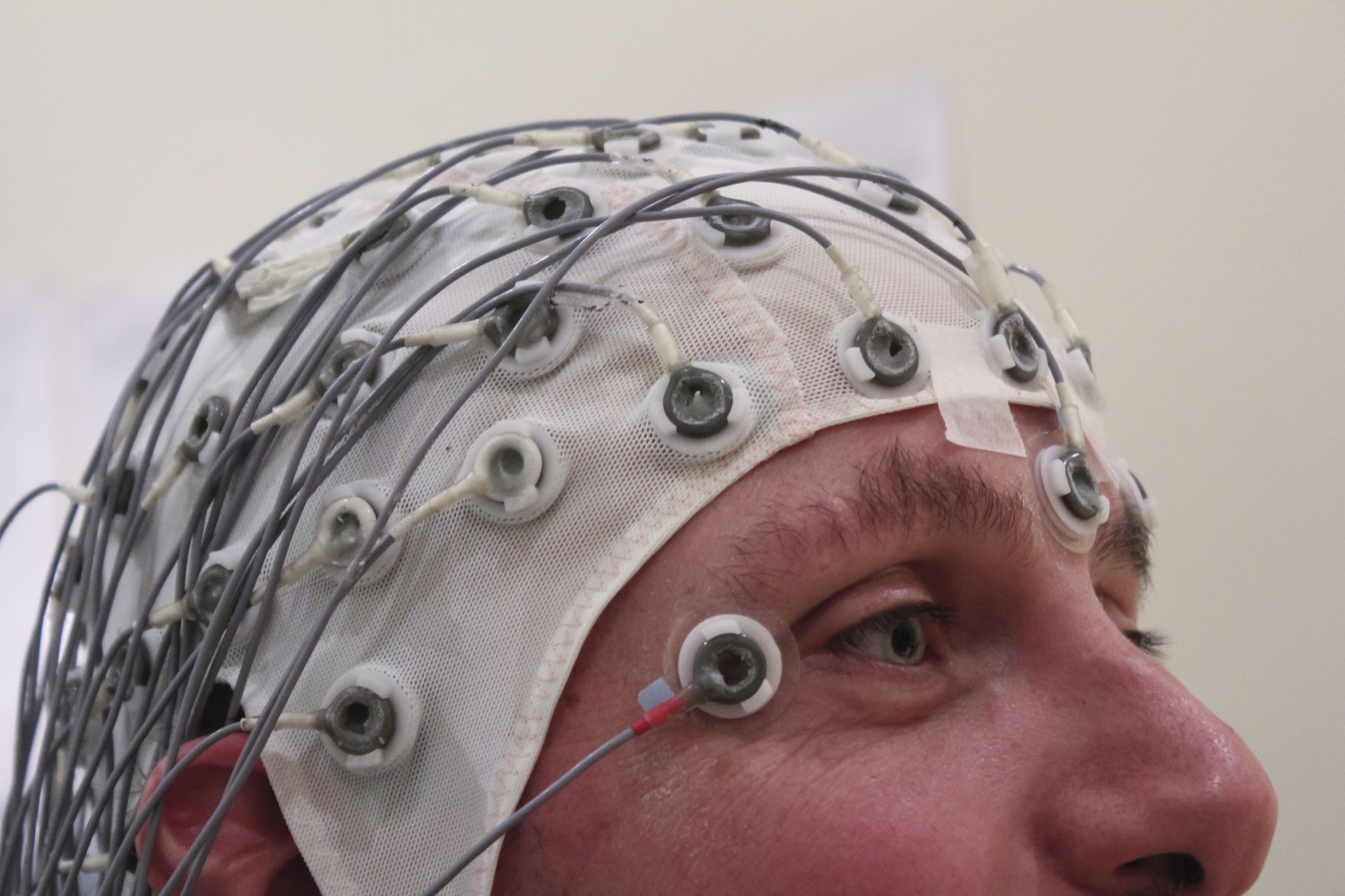
Physiological Systems
Physiological dynamics, coupled biological systems, and measurement frameworks for serious human-centered sensing.
Machine Learning
Inference, optimization, robust learning, calibration, and the technical logic of predictive systems.
Generative and Reasoning Systems
Generative models, reasoning workflows, multimodal generation, and structured behavior at inference time.
Representation and Inference
Latent-variable modeling, self-supervision, multimodal representations, and how internal structure supports useful decisions.
Robotics
Embodied systems, middleware, deployment, and the integration work required to turn models into behavior.
Control and Planning
Feedback, coordination, motion planning, multi-agent execution, and the architecture of decision making in physical systems.
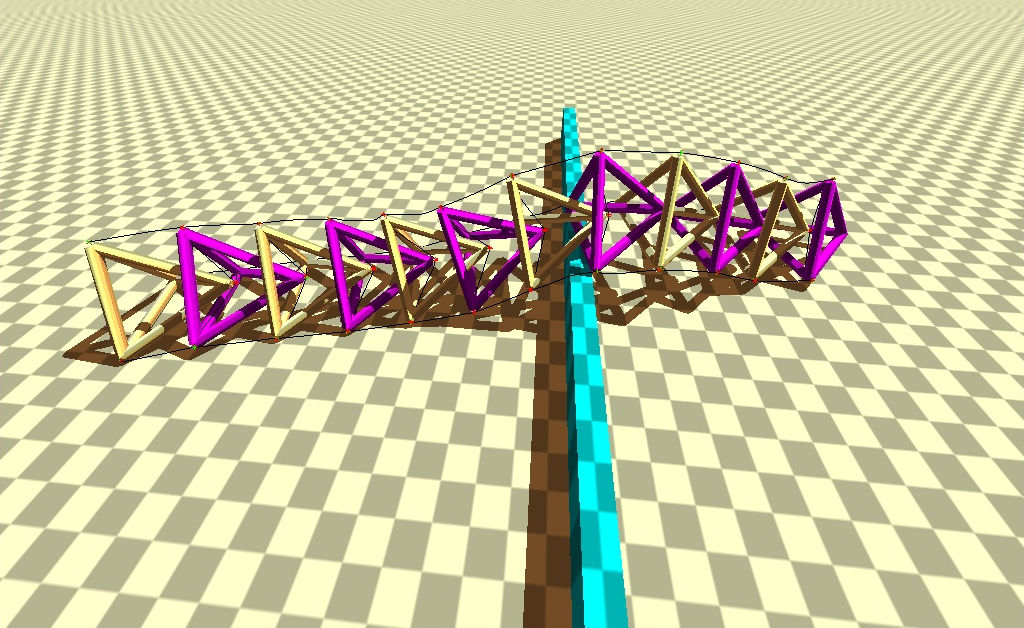
Validation and Simulation
Benchmarking, safety evidence, digital twins, propagation risk, and simulation as an instrument for trustworthy robotics.